|
I am currently a Robotics Master's student at Worcester Polytechnic Institute graduating in May 2024. I have had the opportunity to be a part of multiple projects affiliated to VISLab robotics lab at WPI. I work at the intersection of Perception, Deep learning, and embedded systems. Email Resume GitHub
|

|
|
|
- Programming: Python, C++, C, Matlab, Arduino, HTML, BASH
- Frameworks: PyTorch, TensorFlow, ONNX, CUDA, Open3D, NumPy, ROS, ROS2, Gazebo, Linux, Git, Docker, Flask
- DL Architectures: VGG16, NeRF, CompletionFormer, RangeNet, Segformer, Mask R-CNN, Transformers, LSTM
|
|
|
|
August 2022 - May 2024 (Expected) |
|
|
GPA : 4.0/4.0 |
- Teaching Assistant for MA 1022 : Calculus II (Fall 2022)
- Teaching Assistant for MA 1024 : Calculus IV (Spring 2023)
| Research Experience : Findability Sciences | January 2024 - Ongoing |
- Developing an LLM-based conversational interface for business users to request database records and industry reports.
- Fine-tuning foundational large language models like Llama using market forecasts and real estate-related analyst reports.
- Working on Retrieval Augmented Generation (RAG), SQL Generation and Large Language Model (LLM) optimization.
| Research Experience : VISLab | May 2023 - August 2023 |
- Implementated PointAttN: a Tranformer Network for Point Cloud Completion.
- Experimented with the Geometric Details Perceptron (GDP) and Self Feature Augment (SFA) blocks in encoder.
- Network paid attention to the relationsships between points without dividing shapes into smaller regions.
- Implemented cross layer information integration in the PointAttN Network and enhanced the baseline results by 20%.
|
|
|
|
September 2023 - Ongoing |
|
|
- Working on Sentry bot to create high-quality depth maps through sensor fusion, lidar-camera calibration and classical computer vision techniques.
- Developing software for real-time data integration from Velodyne’s LiDAR and a pair of Long Range RGB cameras.
- Enhancing depth estimation CNN architecture aiming to predict the probability of terrain traversability accuarately.
|
|
May 2023 - August 2023 |
|
|
- Worked on ZED2/GNSS Odometry Fusion to get an accurate position of the voidwalking bot. The final odometry integrated RTK GPS + Visual Odometry + IMU. Enabled the bot to walk GPS and ZED2 within an accuracy of 1cm.
- Autumated test cases in ROS2 for line rendering in RVIZ via calling the sevice through rqt.
- Constructed a Docker-integrated ROS package for SLAM on the environment resulting in a 15% productivity boost.
|
|
May 2020 - Nov 2020 |
|
|
- Developed a deep learning pipeline for detection of O-ring in Camshaft and classification of Camshaft based on presence/absense of O-ring. Project deployed on the production line of Bajaj Auto Pvt. Ltd. Pune for inspection purposes.
- Augmented Reality using OpenCV to augment the blind spot at welding station for same manufacturing plant.
- Prototyped and proposed VR Lab to AIM Laboratory of WPI for experimentation in Biomedical Robotics Research.
|
|
|
Fall 2023 Report: Link Code: GitHub Optimizing a NeLF (Neural Light Field) based novel view synthesis, with techniques such as model pruning and quantization, and
deployed it on iPhone, demonstrating proficiency in on-device deep learning for real-time 3D novel view synthesis.
|

|
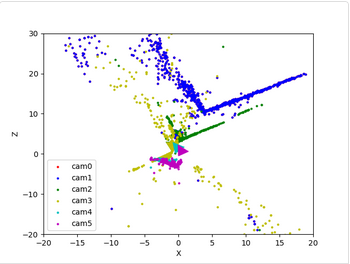
Spring 2023 Code: GitHub In this project, sensor fusion of LiDAR and camera was carried out on the Kitti dataset to obtain painted pointcloud. |
|
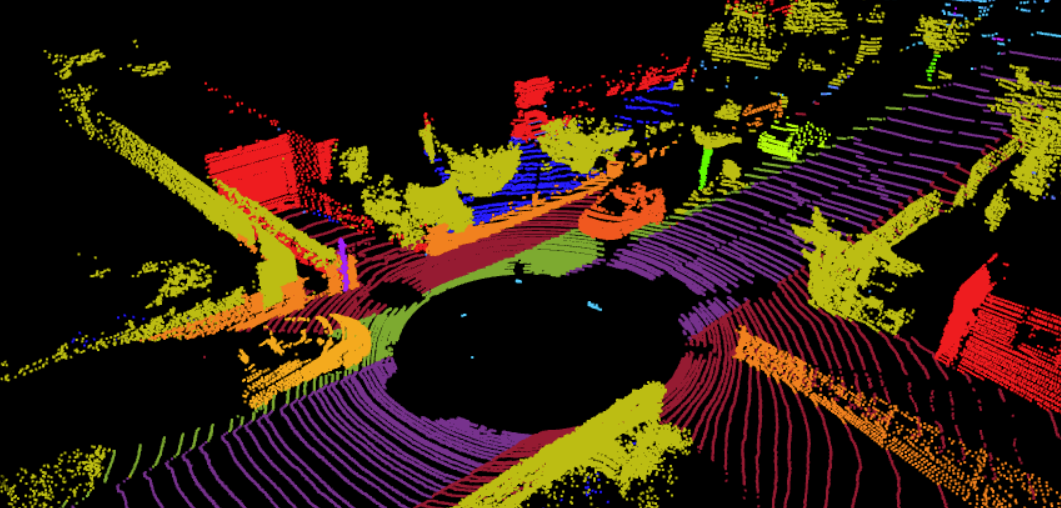
Fall 2022 Report: Link Code: GitHub Panoptic segmentation was done on SemanticKITTI dataset (3D LiDAR Point Cloud Data) which combines the outputs of semantic segmentation and instance
segmentation for Deep Learning under Prof. Fabricio Murai.
|

|
Spring 2023 Report: Link Code: GitHub In this project, I have planned path traversal for non-holonomic robots by state-of-the-art algorithms.
|
|
Spring 2023 P&Q: Link NAS: Link DNI: Link Code: GitHub Code: GitHub These projects include Neural Networks Design from Scratch, Neural Machine Translation.
|
|
Summer 2023 Code: Github Simultaneously reconstructed 3D scene Mapping and extracted camera pose Localization from given stereo camera
correspondences using Non-Linear triangulation, Non-Linear PnP and Bundle Adjustment (BA) pipeline.
|

|
Spring 2023 Code: GitHub
In this project, Detected edges in image using probability based boundary detection using K-means clustering of Oriented DoG (ODoG),
Leung-Malik (LM) and Gabor Filter bank responses. Outperformed the results from classical canny and sobel filters. |
|
Spring 2023 Code: GitHub
In this project, I implemented research work presented by Zhengyou Zhang for Calibrating a Camera which is one of the hallmark papers in
camera calibration. Estimated parameters of the camera like the focal length, distortion coefficients and principle point.
|
|
Spring 2023 Report: Link Code: Github
In this project, we Implemented discrete action space algorithms such as DQN, DQN-MR and DQN-PER on OpenAI Gym’s Third party
environment, Highway-env. Compared training time and accuracy to discover DQN-PER has the best performance.
|
|
Spring 2023 Code: GitHub Designed and deployed Sliding Mode Controllers for trajectory tracking for micro UAVs, with an acceptable error range of 1% while countering environmental noise. Generated a fifth-order trajectory with an accuracy of 0.03% for path planning. |
|
Spring 2023 Code: GitHub This project implements various search based planners (Dijsktra, A star, D star) and sampling-based planners(RRT, RRT star and Informed RRT star).The planners are implemented on a 2d map. |
|
Spring 2023 Code: GitHub These projects include implementation of Epsilon-Greedy Algorithm, Dynamic Programming, Monte Carlo, Temporal Difference Learning, Model-based RL |
|
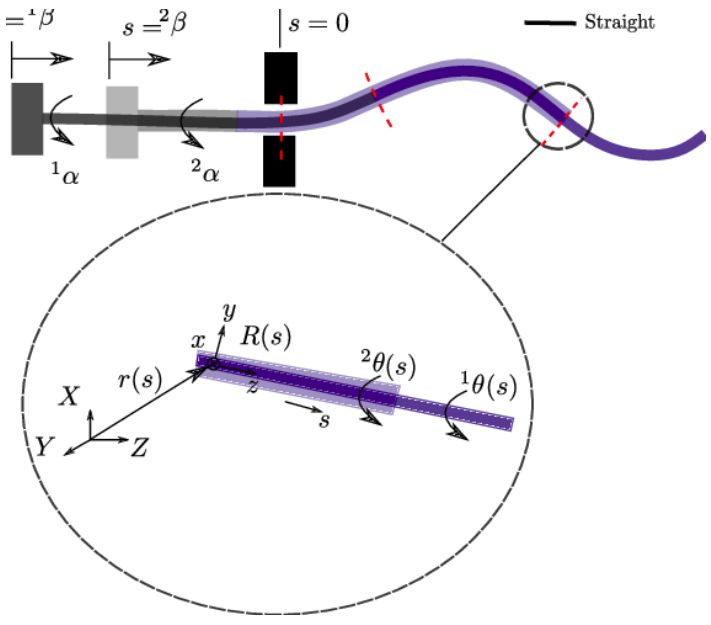
Fall 2022 Code: GitHub
In this project, I reconstructed informed RRT algorithm for path planning of continuum robots which are needle sized manipulators used in
image-guided surgical procedures resulted in accurately generating optimal and feasible path in a dynamic environment..
|
|
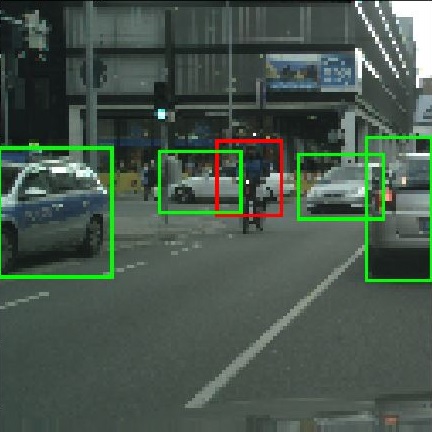
Fall 2022 Code: GitHub Implemented YOLO pipeline from scratch to do object detection on street scene images. |
|
|
|
|
August 2016 - October 2020 |
|
|
GPA : 9.32/10.0 |
|
Great thanks to Jon for his amazing website template! |